Gesteuert durch PLC X - Raupen-Röntgenmaschine Ray Pipeline Crawlerss 250Kv 17Ah Ndtpipeline
Das Grundprinzip des Röntgenstrahlrohrleitungstraktors umfasst hauptsächlich mechanisches gehendes Teil, Strahlngenerationsteil, Stellungsgeber, Logikprüfer, Fernstromversorgungs- und Befehlsquelle und die Positionierung außerhalb der Rohrleitung. Es ist ein automatischer Strahl, der Gerät erzeugt. Das mechanische gehende Teil fährt den Strahl, der Gerät erzeugt, um in Vorbereitung zu bewegen, und der spezielle Röntgenfilm und der Aufkleber werden auf der Rohrkolbenschweißung geklebt. Merken Sie das durch die Zusammenarbeit des Fernsteuerungsgerätes außerhalb der Rohrleitung und in Position bringen und Belichtung kann durchgeführtes in Vorbereitung sein, damit Röntgenstrahlgetriebe der Rohrleitungskolben-Gurtschweißung durchzuführen und die zerstörungsfreie Entdeckung der Rohrleitungskolben-Gurtschweißung zu verwirklichen. Darüber hinaus können das Vorwärts-, das rückwärtige, Rest und andere Aktionen des Traktors durch die Fernbedienung auch gesteuert werden. Staubbekämpfung.
Das Rohrleitungsraupensystem besteht, Mechanismus, Sichtprüfungsgerät zu gehen für das Beobachten und die Entdeckung der inneren Wand des Rohres, der Steuer- und Datenendeinrichtung, des etc. und des Reparaturgerätes für Defekte im Rohr kann gegebenenfalls addiert werden. Entsprechend verschiedenen Anwendungsgelegenheiten kann der Roboter angewendet werden, um Durchmesser von 80mm-120mm, von 120mm-200mm oder von größerem zu leiten; Die minimale Größe der Rohrdefektentdeckung ist 0.5×0.5mm. Der Roboter benutzt DC-Motorantriebsystem, die treibende Kraft ist enorm. Kann Rohrleitungsprobleme effektiv lösen.
Der Hardware-Entwurf des Röntgenstrahlrohrleitungstraktors umfasst: mechanisches gehendes Teil, Strahlungsgenerationsteil, Stellungsgeber, des Teils, des Versorgungsteils und des automatischen Krankenwagens des Prüfers (Stromkreis) mechanisches Teil Faches: es wird aus elektrischem Körper, Vollmacht- zur Belastung des Anlagevermögenskörper, Motor DC-24V, Reduzierers, Gummirades, Achse und Verbindungszusätze verfasst. Die ganze Maschine wird durch Röntgenstrahlrohrleitungsraupe angeschlossen. Aufladungsstromversorgungsauto: wählen Sie 1mm die starke Edelstahlplatte und stempeln und schweißen. Sich zu verformen wird angefordert, um bestimmte Steifheit zu haben und ist nicht einfach. Installieren Sie haltbare materielle Räder. Die Gesamtlänge wird durch das Volumen der Batterie bestimmt. Avoid zunehmender Drehenradius, Zunahmetransportschwierigkeit, die Zeit ist nicht zu lang. Sehen Sie verkabelnde Methode der Batterie. Schematisches Diagramm der Batterieverdrahtung für Teil der Röntgenmaschine (schematisches Diagramm): Unsere vorgeschlagener Entwurfs- und Schnittstellenanforderungen wurden zum fachkundigen Hersteller der Röntgenmaschine überreicht. Spezifische Anforderungen sind: DC-ändert Hochspannungs-DC-Stromversorgung, örtlich festgelegte Brennspannung 160kV, Röhrenstrom 3mA, Teil des Löschens AC/DC, die Parameter des Hochspannungspakets, liefert Störungs-Rückkopplungssignal, den offenen Wärmeableitungsventilator automatisch, automatische Verzögerungsabschaltung wie erforderlich, Energie zu sparen. Die Konsole sollte klein und integriert mit dem x-Kopf sein. Die Struktur nimmt staubdichten Entwurf an. Lokolisierungs-Sensor-Teil: dieses Problem wird im Allgemeinen in der Gammastrahlbahnmaschine sich entwickelte erfolgreich im Jahre 1997 gelöst. Um die Komplexität des Entwurfs zu verringern, können mit Bammel und Fehler in der fehlertoleranten Programmierung beschäftigt werden. Wegen der großen Erschütterung im Transportprozeß, wird das Herstellungsverfahren angefordert, höher zu sein, werden die Teile ausschließlich aussortiert, und Anti-Vibrationsmaßnahmen werden ergriffen.
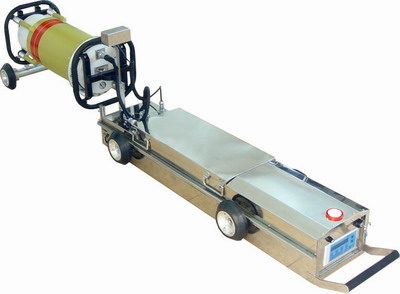
Die Röntgenstrahlrohrleitungsraupen schließen den besonderen Teil ein, der die schweißende Linie der langen Rohrleitung ermitteln kann. Die Röntgenstrahlrohrleitungsraupen haben die Vorteile der hohen radiografischen Qualität, der hohen Abbildungsempfindlichkeit, der niedrigen Durchfallquote und der hohen Arbeits-Leistungsfähigkeit. Die Röntgenstrahlrohrleitungsraupen haben differenziale Fahren und Erschütterungsabsorber. Die Fahrgestelle der Röntgenstrahlrohrleitungsraupen können bewegtes in Vorbereitung ständig sein, ohne exzentrischen Betrieb und umzuwerfen. Die Röntgenstrahlrohrleitungsraupen können mit großer Leistungsfähigkeit bewegtes in Vorbereitung sein, weil sie durch PLC mit dem Schützen es vor dem Blockieren und unter Spannung gesteuert wird. Die Röntgenstrahlrohrleitungsraupe ist einfach, in einige Teile getrennt zu werden und dann zusammengefügt zu werden, also zu tragen ist einfach. Sie können den Aufnahmeparameter ändern und die Röntgenstrahlrohrleitungsraupenmaßnahme, Halt treffen und eine Belichtung mit der Außenkontrollequelle haben. Die Röntgenstrahlrohrleitungsraupen sind einfach zu benützen.
Spezifikation von X Ray Pipeline Crawler
|
Modell
Spezifikation
|
HXPC-100A
|
HXPC-100B
|
HXPC-100C
|
|
Rohrdurchmesser, der Strecke ermittelt
|
Φ800-Φ1500mm
|
Φ500-Φ1000mm
|
Φ273-Φ700mm
|
|
Gesamtgewicht
|
140KG
|
125KG
|
100KG
|
|
Raupenlänge
|
2200mm
|
2000mm
|
2000mm
|
|
Kriechengeschwindigkeit
|
15M/min
|
15M/min
|
15M/min
|
|
Kriechenabstand
|
2KM
|
2KM
|
2KM
|
|
Lokalisieren des Fehlers
|
±5mm
|
±5mm
|
±5mm
|
|
Max.output-Spannung
|
300Kv
|
250Kv
|
200Kv
|
|
Max.outout gegenwärtig
|
3mA
|
3mA
|
3mA
|
|
Steigfähigkeit
|
40°
|
40°
|
25°
|
|
Strahlungswinkel
|
360°*35°
|
360°*35°
|
360°*35°
|
|
Spitzenleistung
|
1.5KW
|
1.25KW
|
1KW
|
|
Batteryenergy
|
22Ah/120V
|
17Ah/120V
|
12Ah/120V
|
|
Leistungsstärke
|
300W
|
300W
|
200W
|
|
Expositionsdauer
|
1s~1h setzt justierbares fort
|
1s~1hcontinues justierbar
|
1s~1hcontinues justierbar
|
|
Belichtungsspannung
|
Auswahl 5
|
Auswahl 5
|
Auswahl 5
|
|
Operationstemperatur
|
-30°~ 70°
|
-30°~ 70°
|
-30°~ 70°
|
Die Raupe schließen unterhalb der Teile als Zubehör ein:
Hauptfahrzeug
Bleisäurestapel: 110V (22Ah)
Röntgenmaschine: 250KV/5mA
Fernprüfer (Elektroinduktionsart, keine Quelle)


 Ihre Nachricht muss zwischen 20 und 3.000 Zeichen enthalten!
Ihre Nachricht muss zwischen 20 und 3.000 Zeichen enthalten!